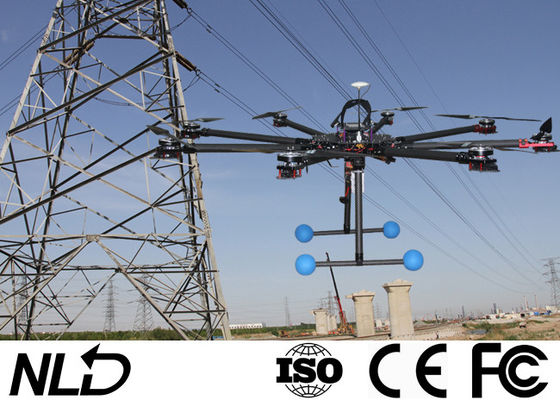
Línea eléctrica de encadenación profesional del abejón del UAV de 8 rotores para la línea de transmisión grado industrial de la construcción
Detalles rápidos:
Regulador de vuelo: DJI V2 + GPS;
Velocidad máxima del vuelo: 14m/s;
Altura que vuela relativa: Los 2000m máximos
Carga: Cargador de batería dual
Especificación:
| Rotor |
8 |
Batería de la exhibición |
11.1V 2200mA |
| Material del cuerpo |
fibra de carbono llena |
Despegue y modo de aterrizaje |
despegue y aterrizaje verticales |
| Cámara |
Sí |
Gama de la teledetección teledirigida, |
≤1.5km |
| Vuelo control+GPS |
DJI-V2 |
Peso estándar del vuelo |
8kg |
| Cámara de HD |
|
Peso eficaz de la carga |
5kg |
| Transmisor de la imagen |
5,8 |
Tipo de la batería |
batería de litio 22V 16000mA |
| Teledirigido |
Sí |
Tiempo de vuelo de la carga |
Cerca de 15-20 minutos |
| Exhibición de tierra |
Sí |
Max Flight Speed |
14m/s |
| OSD |
|
Altura que vuela relativa |
los 0-2000m |
| PAQUETE |
caja de aluminio |
Velocidad que vuela |
0-15m/s (0-54km/h) |
| Cargador |
Sí |
Exactitud de control de exploración del vuelo |
Vertical los 0.5m, paralelo el 1m |
| Dispensador |
|
Temperatura de trabajo |
-40℃-60℃ |

Instrucción:
Al instalar el propulsor, el propulsor está en la parte inferior y la junta está en el top. Tighte los dos tornillos para terminar la instalación.
Nota: Los dos jefes del propulsor son rojos y corresponden a la sección principal. El lado izquierdo es pulpa de no. 1 y el lado derecho es pulpa de no. 2. Instale no. 1, no. 2, no. 1, no. 2…
Extremidad: ¡El propulsor puede hacer lesión, por favor tener cuidado!
¡En todo caso, si usted necesita eliminar errores de los aviones, quite por favor el propulsor!
Nota:
Distracción①: En este engranaje, el abejón está volando según las instrucciones del operador del control remoto de actuar las palancas de mando izquierdas y derechas. (En este engranaje, la atención de la paga a la orientación principal y al canal de la navegación, adelante a la nariz y al revés a la cola. delantero)
Dirección de la cerradura②: La dirección de dirección cuando comenzar la fijación es el sistema de referencia. Al fijar la cerradura de dirección, usted primero necesita determinar la dirección en la cual usted se coloca. Cuando usted la fija, no importa dónde es el abejón, donde la cabeza está haciendo frente, el empuje y tira del palillo derecho hacia adelante y hacia atrás, el abejón se moverá a lo largo del paralelo de la trayectoria a su dirección delantera y trasera.
Cerradura de punto de vuelta③: La tracción de la palanca derecha al revés volverá el abejón al punto del despegue, no importa dónde la nariz está haciendo frente.
Modo de la vuelta④: En este modo, el abejón vuelve e incorpora gradualmente el campo visual. Aproximadamente 20 metros del punto de vuelta, la persona sin tripulación aumentan/bajan los 20m de la tierra y comienzan automáticamente a descender. Para evitar desviaciones, el teledirigido se puede actuar para caer manualmente el abejón en la gama visible.
Modo del ATT⑤: En este modo, el módulo de GPS no se utiliza para colocar, y el abejón proporciona solamente la estabilización de la postura. En la operación real, la persona sin tripulación deriva y no puede al parecer asomar. La mano que vuela se requiere para corregir continuamente la posición del abejón a través del control remoto.
Modo de GPS⑥: Los UAVs utilizan los módulos de GPS o los sistemas multidireccionales de la visión para alcanzar el cernido exacto, señalando vuelo, las rutas de planificación, los etc. todas necesitan ser realizados en este modo.
Taller:

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!